
DIY Robotic Platform Aims to Solve Walking in VR
[Mark Dufour]’s TACO VR project is a sort of robotic platform that mimics an omnidirectional treadmill, and aims to provide a compact and easily transportable way to allow a user to walk naturally in VR.
 Unenthusiastic about most solutions for allowing a user to walk in VR, [Mark] took a completely different approach. The result is a robotic platform that fits inside a small area whose sides fold up for transport; when packed up, it resembles a taco. When deployed, the idea is to have two disc-like platforms always stay under a user’s feet, keeping the user in one place while they otherwise walk normally.
Unenthusiastic about most solutions for allowing a user to walk in VR, [Mark] took a completely different approach. The result is a robotic platform that fits inside a small area whose sides fold up for transport; when packed up, it resembles a taco. When deployed, the idea is to have two disc-like platforms always stay under a user’s feet, keeping the user in one place while they otherwise walk normally.
It’s an ambitious project, but [Mark] is up to the task and the project’s GitHub respository has everything needed to stay up to date, or get involved yourself. The hardware is mainly focused on functionality right now; certainly a fall or stumble while using the prototype looks like it would be uncomfortable at the very best, but the idea is innovative.

Locomotion issues as a whole are still not entirely solved problems in VR. It’s a space in which inspired hobbyists can absolutely experiment and innovate in a meaningful way. After all, the unique locomotion system in Gorilla Tag — a VR multiplayer game in which players are legless gorillas who move using only their arms — is a fantastic success and was the work of a single inspired developer. There’s definitely room for experimentation.
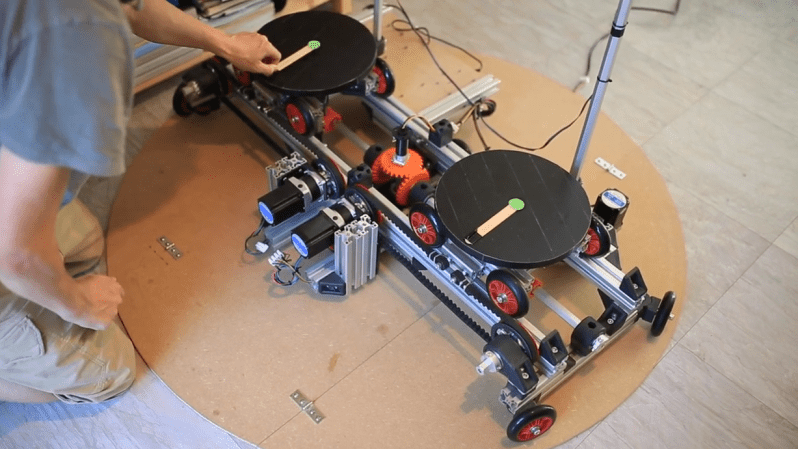
The TACO platform is a work in progress, but the pieces are coming together. You can see a test in the video below, in which two green markers represent a user’s feet. Watch the two platforms move and rotate as necessary to stay beneath the user’s (simulated) feet, meaning a user could walk normally, yet not move anywhere.



Post a Comment