
Optimising A RC Tilt-Rotor VTOL
There are a variety of possible motor configurations to choose from when building a fixed-wing VTOL drone, but few take the twin-motor tilt-rotor approach used by the V-22 Osprey. However, it remains a popular DIY drone for fans of the military aircraft, like [Tom Stanton]. He recently built his 5th tilt-rotor VTOL and gave an excellent look at the development process. Video after the break.
The key components of any small-scale tilt-rotor are the tilt mechanism and the flight controller. [Tom]’s tilt mechanism uses a high-speed, high-torque servo that rotates the motor mount via 3D printed gear mechanism. This means the servo doesn’t need to bear the full load of the motor, and the gearing can be optimized for torque and speed. [Tom] also used the tilting motors for yaw and roll control during forward flight, which allows him to eliminate all the other conventional control surfaces except for the elevator.
The flight controller consists of a Teensy and gyro/accelerometer module, and runs dRehmFlight flight stabilization firmware. dRehmflight was specifically created to be easily adapted to a wide variety of experimental aircraft configurations, and it allowed [Tom] to get airborne on the first attempt.
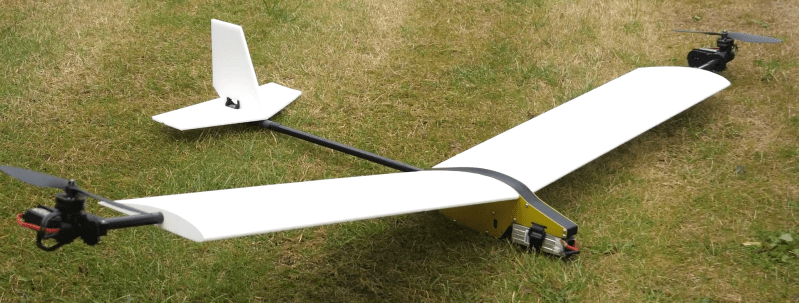
Carbon fiber tubes are used for the wing spars and tail boom, and are bolted to a fuselage made from 3D printed brackets and 1 mm fiberglass-reinforced plastic sheet. [Tom] picked a NACA 4412 airfoil wing for its linear coefficient of lift over a wide angle-of-attack range, allowing a smooth transition between hover and forward flight. The wing was 3D printed with lightweight foaming PLA (LW-PLA), which required some careful design for a quality print. The foaming of LW-PLA means it will always ooze if it stops extruding, so [Tom] designed the wing surface and internal ribs to be extruded in one continuous line using the slicer’s “vase mode”. There were some issues with the matt black wings starting to warp in the sun, which was solved by re-printing the wings in white.
The aircraft performs well in both flight modes, but had some trouble slowing down when transitioning back to hover. It’s a major improvement over the previous version, which lacked yaw control in a hover, and was a bit unstable in forward flight.


Post a Comment