
Complex Movements From Simple Inflatables, Thanks to Physics
Inflatable actuators that change shape based on injected pressure can be strong, but their big limitation is that they always deform in the same way.

But by taking structural inspiration from origami, researchers created 3D-printed actuators that show it is possible to get complex movements from actuators fed by only a single source of pressure. How is this done? By making the actuators physically bi-stable, in a way that doesn’t require additional sources of pressure.
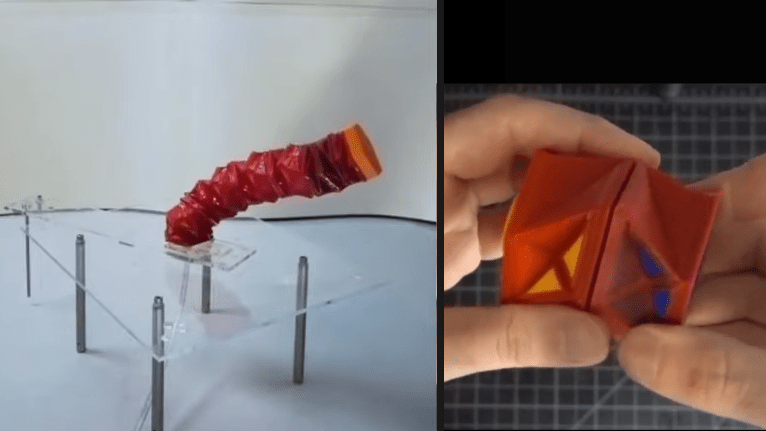
The key is a modified design based on the Kresling pattern, with each actuator having a specially-designed section (the colored triangles in the image above) that are designed to pop out under a certain amount of positive pressure, and remain stable after it has done so. This section holds its shape until a certain amount of negative pressure is applied, and the section pops back in.
Whether or not this section is popped out changes the actuator’s shape, therefore changing the way it deforms. This makes a simple actuator bi-stable and capable of different movements, using only a single pressure source. Stack up a bunch of these actuators, and with careful pressure control, complex movements become possible. See it in action in two short videos, embedded just below the page break.
Here is a video accompanying the research paper that demonstrates the actuator design. These actuators are 3D-printed from TPU and PLA. Embedded just below that one is a video of a 12-actuator column demonstrating complex movements, all driven by a single pressure source.
Origami and the designs found in our natural world mesh well with robotics in general, and it’s fascinating to see how such simple structural changes can have such big effects on a design.
[via TechXplore]



Post a Comment